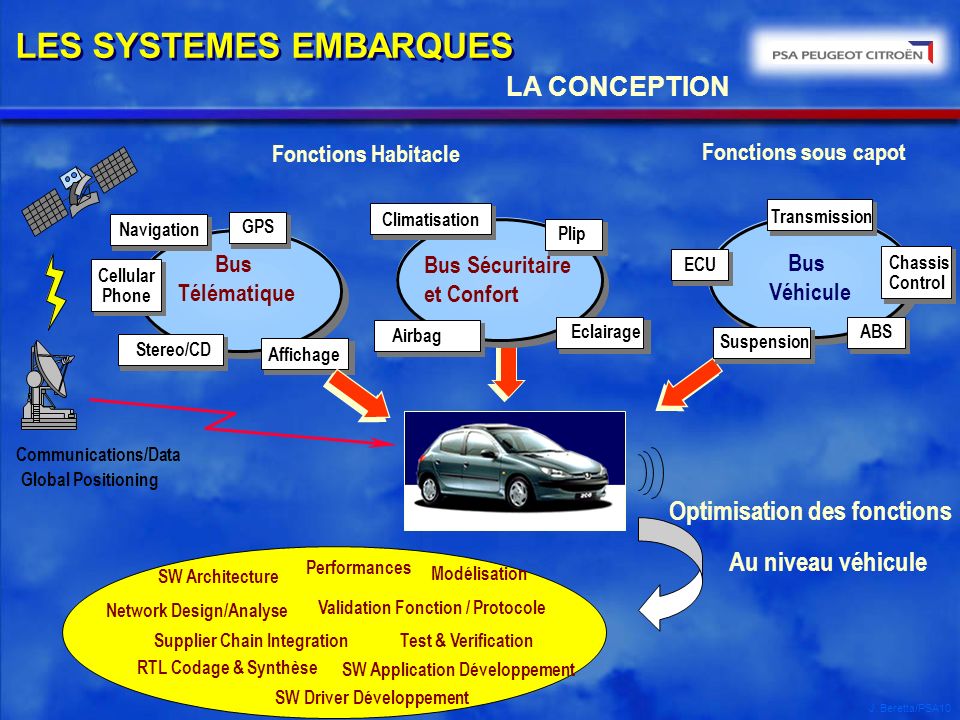
Réseaux de communication pour systèmes embarqués - CAN, CAN FD
Cet ouvrage décrit les différents types de réseaux multiplexés, aujourd’hui présents dans de multiples domaines industriels. Il se compose de quatre parties qui exposent leurs fondements, particularités, problèmes de mise en oeuvre et manières de
Cet ouvrage décrit les différents types de réseaux multiplexés, aujourd’hui présents dans de multiples domaines industriels. Il se compose de quatre parties qui exposent leurs fondements, particularités, problèmes de mise en oeuvre et manières de les résoudre :• La première traite des protocoles de type « event triggered » comme le CAN, le CAN FD et le LIN.• La deuxième décrit en détail les protocoles de type « time triggered » comme le TT CAN, le FlexRay.• La troisième partie s’intéresse aux protocoles audio-vidéo tels que MOST et Ethernet.• La quatrième partie couvre les réseaux auxiliaires tels que Safeby-Wire et Communications RF.
PCAN-miniPCIe FD: PEAK-System

Interface CAN FD / AUTOMOTIVE ETHERNET / LIN

PCAN-miniPCIe FD: PEAK-System

Émetteurs-récepteurs de bus CAN améliorés
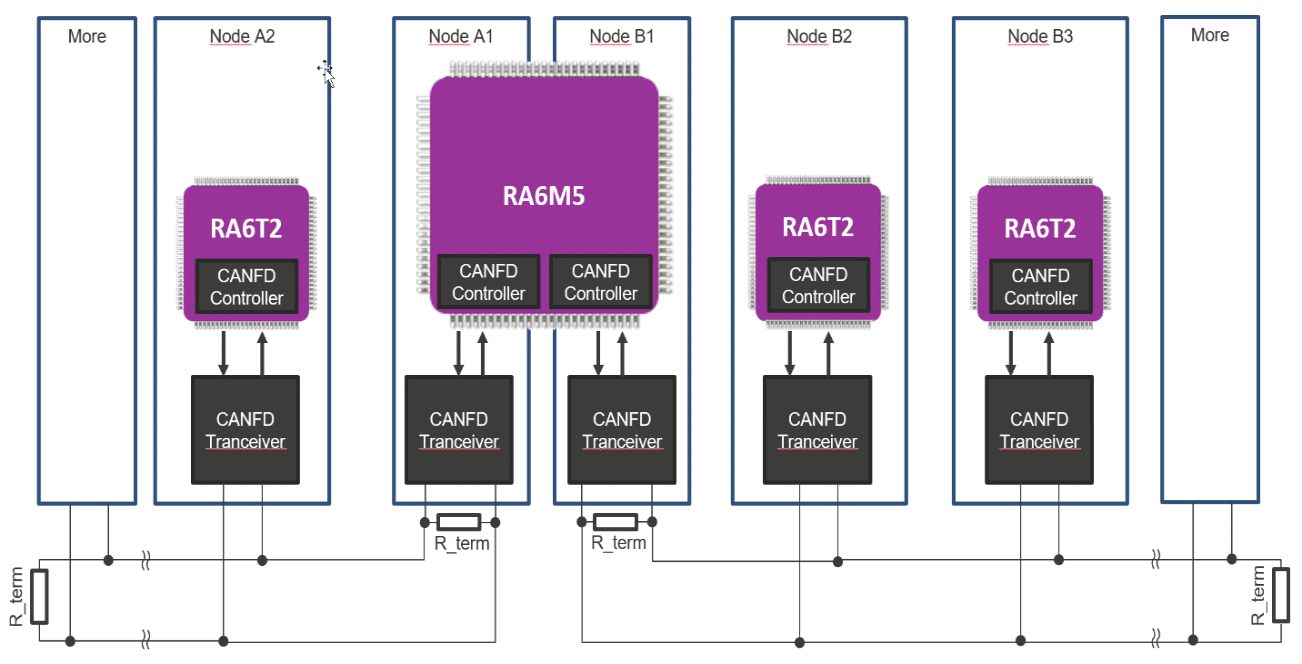
Le protocole CAN FD
Les avantages des protocoles CAN et CANopen dans un système embarqué - ISIT
Interfaces et analyseurs CAN et CAN FD

Interface CAN FD / AUTOMOTIVE ETHERNET / LIN

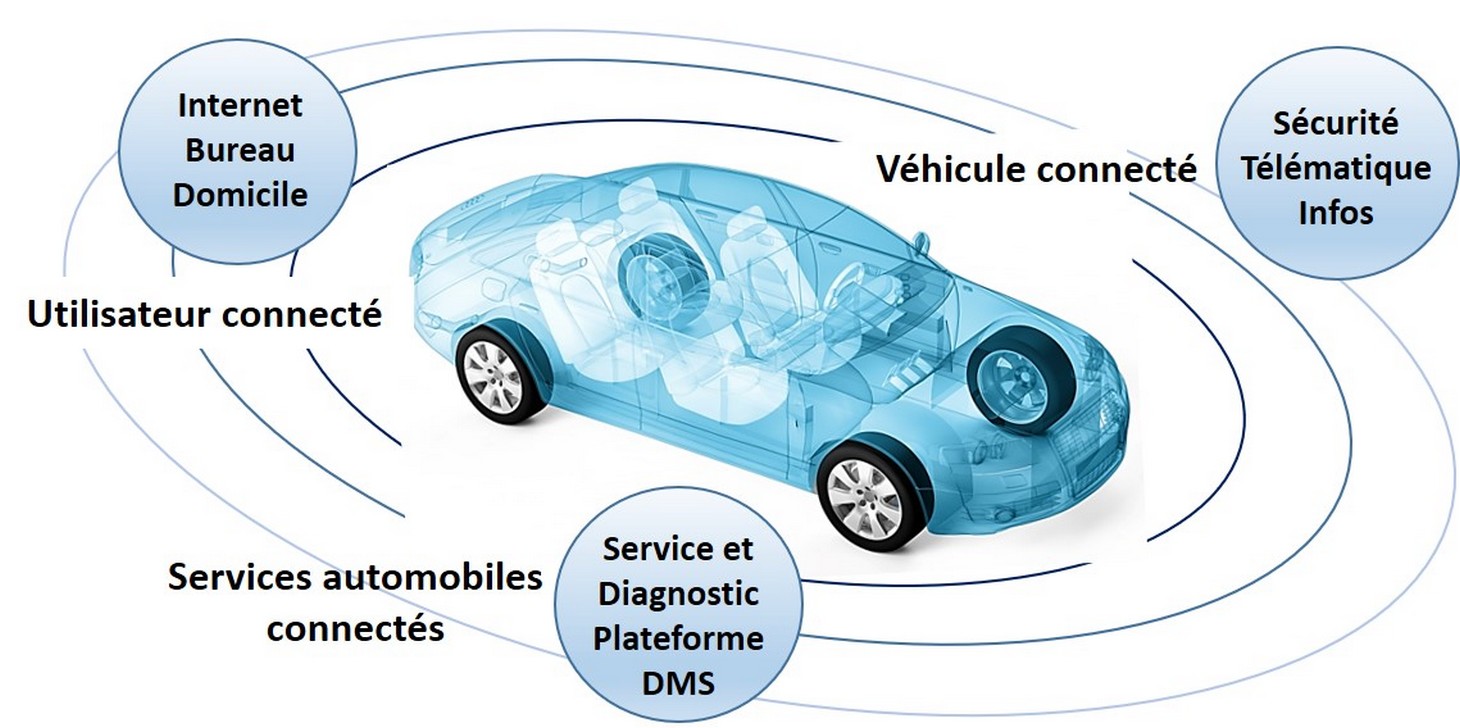
Sécurité informatique des véhicules — Wikipédia

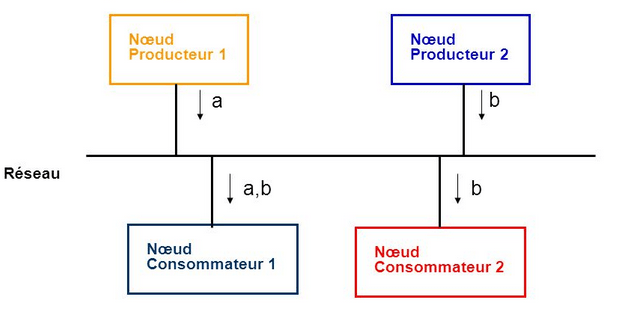
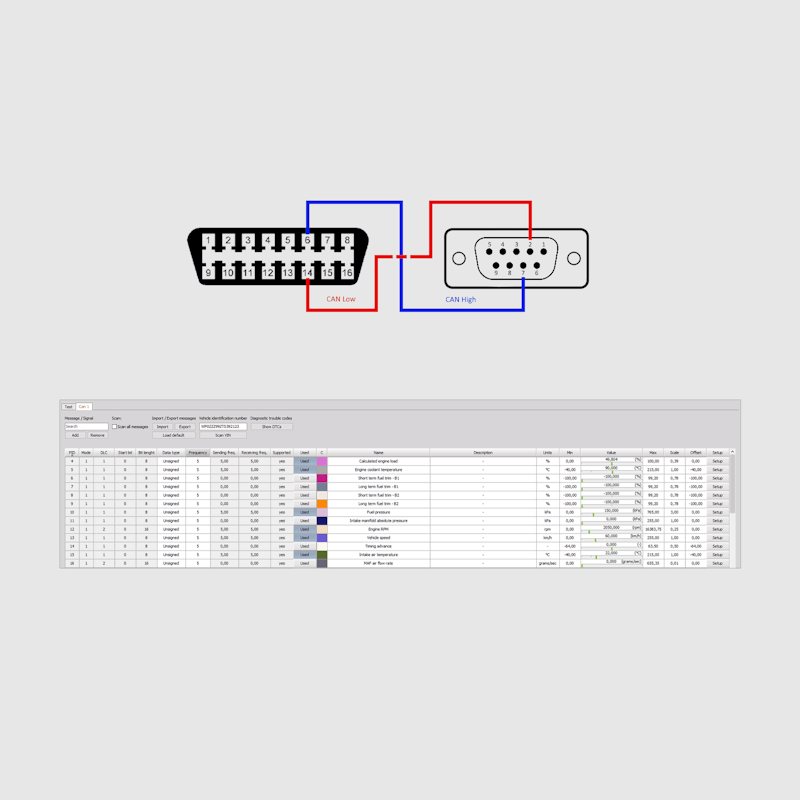
Comprendre le Bus CAN: Comment fonctionne-t-il?

Carte Can FD pour la 5G V2X et l'AIoT

Pourquoi le CAN FD ? - ISIT
CAN FD – Tout sauf automobile
Le Protocole DoIP